
การสร้างแบบจำลองสารสนเทศอาคารสำหรับอาคารเก่าโดยใช้ข้อมูลกลุ่มจุด 3มิติหรือ 3D Point cloud data
มีวัตถุประสงค์หลักคือเพื่อประยุกต์ใช้ข้อมูลกลุ่มจุด 3มิติจากเครื่อง 3D Laser Scanner สร้างแบบจำลองสารสนเทศอาคาร, เพื่อศึกษาขั้นตอนการทำงานการสำรวจแบบสามมิติและเพื่อศึกษาหาจุดแข็งและจุดอ่อนในการใช้ข้อมูลกลุ่มจุด 3 มิติสร้างแบบจำลองสารสนเทศอาคาร
การทดลองหรือ Case study เริ่มจากใช้กล้องสามมิติ 3D Laser Scanner ยี่ห้อ FARO Technologies รุ่น Focus S150 เก็บข้อมูลมิติอาคาร 2 ของคณะวิศวกรรมศาสตร์ มหาวิทยาลัยศรีปทุม กรุงเทพมหานครฯ ทั้งหมด 210 ตำแหน่งและนำข้อมูลที่ได้มาประมวลผลเป็นข้อมูลกลุ่มจุด 3 มิติ ด้วยโปรแกรม FARO SCENE SOFTWARE และนำมาสร้างแบบจำลองสารสนเทศอาคารด้วยเขียนแบบ โปรแกรม Autodesk Revit 2024
ซึ่งผลจากการทดลองพบว่าเมื่อใช้ข้อมูลกลุ่มจุด 3 มิติหรือ 3D Point cloud model ในการสำรวจข้อมูลอาคารแล้วนำมาสร้างแบบจำลองสารสนเทศอาคารมีขั้นตอนที่ไม่ยุ่งยากซ้อน ได้ข้อมูลทางการวัดระยะขนาดทางกายภาพของอาคารมีความละเอียมมากกว่าเมื่อเทียบกับการสำรวจอาคารด้วยเครื่องมือธรรมดาเช่นตลับเทป มีการกระจายตัวของชุดข้อมูลปริมาณมากและเพียงพอต่อการสร้างแบบจำลองหรือการขึ้นโมเดล ได้ระดับความละเอียดของโมเดลเท่ากับ LOD 300 โดยจุดแข็งในการใช้ข้อมูลกลุ่มจุด 3มิติในการสำรวจอาคารนั้นคือมีความรวดเร็วและปลอดภัย สาหรับจุดอ่อนคือราคาสูง
วัตถุประสงค์ของการทดลอง Case Study
1.เพื่อประยุกต์ใช้ข้อมูลกลุ่มจุด 3 มิติจากเครื่อง 3D Laser Scanner สร้างแบบจำลองสารสนเทศอาคาร
2.เพื่อศึกษาขั้นตอนการทำงาน
3.เพื่อศึกษาหาจุดแข็งและจุดอ่อนในการใช้ข้อมูลกลุ่มจุด 3 มิติสร้างแบบจำลองสารสนเทศอาคาร
กรอบแนวคิดการทดลอง Case Study
ตัวแปรต้น: รูปแบบการสำรวจเก็บข้อมูลเพื่อสร้างแบบจำลองสารสนเทศอาคารเก่าโดยใช้ข้อมูลกลุ่มจุด 3 มิติ
ตัวแปรตาม: ข้อมูลแบบจำลองสารสนเทศอาคารเก่า
วิธีดำเนินการและขั้นตอนการทดลอง Case Study
1.ทีมสำรวจ 3D Survey จากบริษัท วาลิด วิชั่น จำกัด นำกล้องสำรวจสามมิติ 3D Laser Scanner ยี่ห้อ FARO รุ่น Focus S150 เข้าเก็บข้อมูลอาคารโดยเริ่มต้นจากบริเวณชั้นดาดฟ้า ของชั้นสี่ จำนวนตำแหน่งการวางกล้อง 10 ตำแหน่ง

2.สำรวจเก็บข้อมูลของชั้นดาดฟ้าสมบูรณ์แล้ว ทำการวางตำแหน่งกล้องบริเวณโถงบันใดเพื่อสำรวจเก็บข้อมูลจากชั้นดาดฟ้าลงมาที่ชั้นสี่ของอาคาร การเก็บข้อมูลบริเวณโถงบันใดมีความสำคัญ เพราะเป็นการถ่ายระดับความสูงจากชั้นบนสุดลงมาที่ชั้นสี่ เราจะได้ระดับความสูงจริงของผิวพื้นชั้นดาดฟ้าลงมาถึงผิวพื้นทางเดินของชั้นสี่

3.ทีมสำรวจเก็บข้อมูลของมิติห้องทุกห้อง มิติทางเดิน ของชั้นสี่ของอาคารให้ครบสมบูรณ์ จำนวนตำแหน่งในการตั้งกล้องสำรวจ 35 ตำแหน่งเพื่อครอบคลุมพื้นที่

4.สำรวจเก็บข้อมูลของชั้นสี่สมบูรณ์แล้ว ทำการวางตำแหน่งกล้องบริเวณโถงบันใดเพื่อสำรวจเก็บข้อมูลจากชั้นสี่ลงมาที่ชั้นสามของอาคาร เราถ่ายระดับความสูงจากชั้นสี่ ลงมาที่ชั้นสาม เราจะได้ระดับความสูงจริงของผิวพื้นชั้นสี่ลงมาถึงผิวพื้นทางเดินของชั้นสาม (floor to floor height)

5.ทีม 3D Scan ทำการสำรวจเก็บข้อมูลมิติอาคารในลักษณะเดียวกันเช่นนี้จนครบทุกชั้นคือ ชั้นดาดฟ้า ชั้นสี่ ชั้นสาม ชั้นสองและชั้นหนึ่ง หลังจากนั้นเมื่อเก็บข้อมูลกลุ่มจุดจากภายในอาคารชั้นหนึ่งเสร็จสมบูรณ์ ทีมสำรวจเริ่มวางตำแหน่งกล้องจากทางเข้าอาคารออกสู่ตำแหน่งการสำรวจเก็บข้อมูลภายนอกอาคาร ณ ขั้นตอนนี้เราจะได้ข้อมูลสำรวจกรอบ ขอบเขตอาคาร ผิวผนัง ภายนอกอาคาร เช่น ความสูงอาคาร ข้อมูลผิวระเบียงทางเดินด้านนอกอาคาร ผนังอาคารด้านนอก โดยการวางตำแหน่งกล้องต่อเนื่องจนครอบคลุมบริเวณด้านนอกอาคารทั้ง 4 ด้าน กล้องสแกนสามมิติจะเก็บข้อมูลของ Landscape รอบๆอาคารไปด้วยเช่นกัน รวมถึงบริเวณอาคารและพื้นที่รอบๆ อาคาร2

6.นำข้อมูลที่ได้จากกล้อง Laser scanner มาประมวลผลจะได้
รูปแบบข้อมูลโมเดลสามมิติชนิดกลุ่มจุด 3D Point cloud Model เราใช้โปรแกรม FARO SCENE SOFTWARE เวอร์ชั่น 2023 ของบริษัทฟาโร เทคโนโลยี่ จำกัด ขั้นตอนนี้เรียกว่า Pre-Processing data กล่าวคือเรานำเข้าข้อมูลสำรวจที่เป็นข้อมูลดิบของกล้องตำแหน่งต่างๆ จำนวน 210 ตำแหน่ง มาทำการเชื่อมต่อให้อยู่บนข้อมูล Coordinate เดียวกัน เพื่อทำให้ข้อมูลกลุ่มจุดจำนวน 210 ชุดข้อมูลรวมเป็นข้อมูลชุดเดียวกัน เป็นข้อมูลกลุ่มจุด 3มิติที่มีข้อมูลมิติของอาคารทั้งภายนอกและภายในอาคาร บันทึกข้อมูลเป็นนามสกุล *.FLS (FARO LASER SCANNER) และ export ไฟล์ข้อมูล *.FLS เป็น ไฟล์ข้อมูล *.RCP (AutoDesk Recap)

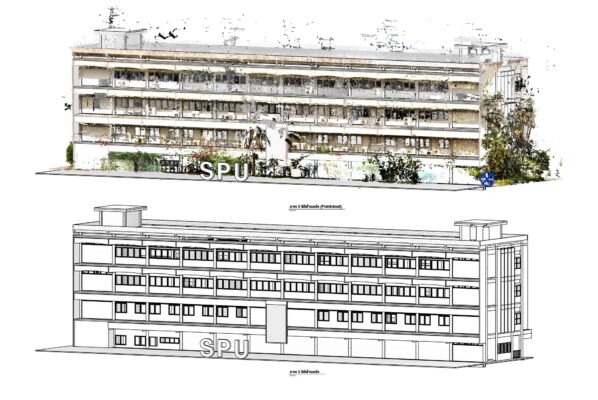
7.ขั้นตอนสุดท้าย นำข้อมูลกลุ่มจุด3 มิติ 3D Point cloud model ของอาคารที่สมบูรณ์แล้ว ขณะนี้อยู่ในรูปไฟล์ *.RCP นำเข้าสู่โปรแกรม Autodesk Revit 2024 เพื่อสร้างแบบจำลองสารสนเทศอาคารในรูปแบบโมเดลสามมิติ CAD ไฟล์

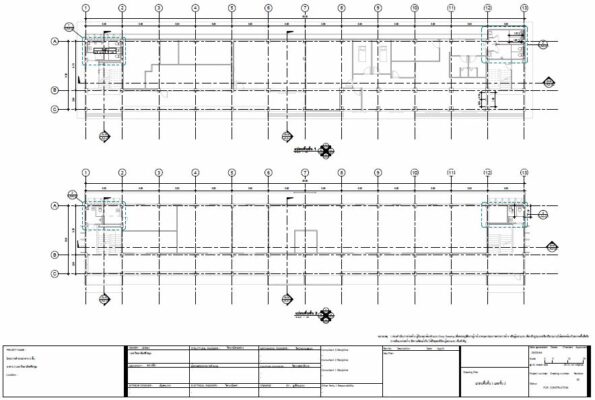
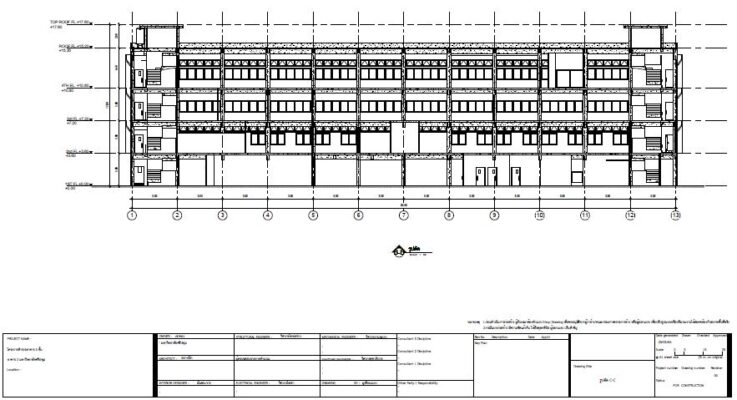
8.สร้างแบบจำลองสารสนเทศอาคารโดย โปรแกรม Autodesk Revit 2024 ได้แบบจำลองสารสนเทศอาคาร เราสามารถกำหนดให้โปรแกรม Autodesk Revit ฉายภาพแปลนของแต่ละชั้น Plan, ฉายภาพด้าน 4 ด้าน Elevation และสามารถกำหนดภาพตัดได้ตามระยะที่เรากำหนด Cross section จากโมเดลสามมิติในไฟล์ *.RVT (Autodesk Revit) เราสามารถแปลงไฟล์เป็นนามสกุล Autodesk AutoCAD *.DWG ทั้งในแบบ 2D และ 3D model ได้
Autodesk revit นั้นมีความสามารถหนึ่งที่เราสามารถทำการส่งออกไฟล์เป็นนามสกุล IFC (The Industry Foundation Classes) ที่ถูกพัฒนาโดย buildingSMART® ซึ่งจะเป็นไฟล์มาตรฐานที่ถูกพัฒนาขึ้นเพื่อให้สามารถทำการร่วมกันระหว่างซอฟท์แวร์ที่แตกต่างกัน ซึ่งก็จะช่วยลดปัญหาของการทำงานข้ามแพลตฟอร์ม
สรุปผลการทดลองการทำ Case study
1.การศึกษาการประยุกต์ใช้ข้อมูลกลุ่มจุด 3มิติจากเทคนิคการสำรวจอาคารด้วยเครื่อง 3D Laser Scanner เพื่อสร้างแบบจำลองสารสนเทศอาคาร สามาถทำได้ง่าย สะดวก ปลอดภัย ได้ข้อมูลที่แม่นยำระดับมิลลิเมตร
2.ขั้นตอนการทำงานการสำรวจแบบ 3มิติ ไม่ซับซ้อน สามารถเขียนเป็น Diagram ได้ดังนี้
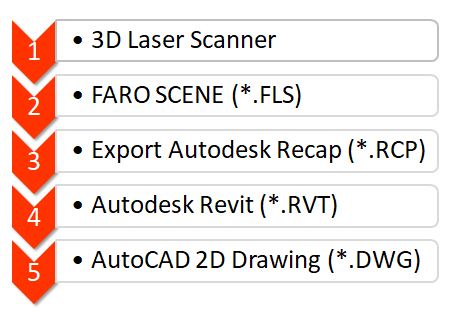
3D Laser Scanner >> FARO SCENE (*.FLS) >> Export Autodesk Recap (*.RCP) >> Autodesk Revit (*.RVT) >> AutoCAD 2D Drawing (*.DWG)
แบบจำลองสารสนเทศอาคารเก่า โดยใช้ข้อมูลกลุ่มจุด 3 มิติ จากกล้อง FARO Focus 3D Laser Scanner พบว่าข้อมูล กลุ่มจุด 3 มิติ สามารถนำมาใช้ในการสร้างแบบจำลองสารสนเทศอาคารได้ โดยระดับความละเอียดเท่ากับ LOD 300-400 คือ จะมีขอบเขตพื้นที่ ขนาดรูปร่างชัดเจน ตาแหน่งเสา คาน ผนัง ความสูง floor to floor พื้น ช่องเปิดต่างๆเช่นช่องประตู หน้าต่าง รวมถึงอุปกรณ์สุขภัณฑ์ ที่สแกนติดมา ส่วนรายละเอียดระดับ LOD 500 สามารถทำได้ ต้องใช้กล้องสำรวจ FARO Focus 3D Laser Scanner ไปตั้งใกล้บริเวณหรือส่วนที่ต้องการลงรายละเอียดให้มากขึ้น ต้องใช้เวลาในการสแกนเก็บข้อมูลมากขั้น และการวาดโมเดลรายละเอียดมากขึ้น
อาคาร 2 ของมหาวิทยาลัยศรีปทุม วัดพื้นที่ใช้สอยอาคารทั้งหมด 2,880ตารางเมตร จากข้อมูลสารสนเทศอาคาร
3.จุดแข็งและจุดอ่อนในการสร้างแบบจำลองสารสนเทศอาคารเก่า โดยใช้ข้อมูลกลุ่มจุด 3 มิติ จากการทดลองพบว่าจุดแข็งของการสำรวจอาคารด้วยข้อมูลกลุ่มจุด 3มิติ คือ สามารถสำรวจข้อมูลอาคารได้ในตำแหน่งที่เข้าถึงยากได้เช่น โครงสร้างหลังคาโดยไม่ต้องทำการติดตั้งนั่งร้านทำให้มีความรวดเร็วและความปลอดภัยในการทำงาน พื้นที่ที่มีความเว้า ความโค้ง ที่ยากต่อการวัดแบบธรรมดา ใช้เวลาสำรวจน้อย ใช้ทีมงานสำรวจจำนวนน้อยเพียง 2คนเท่านั้น ความคลาดเคลื่อนความแม่นยำของข้อมูลได้ระดับมิลลิเมตร
การสำรวจเลเซอร์สแกนอาคารและข้อมูลกลุ่มจุด 3 มิติสามารถนำมาใช้ในการสร้างแบบจำลองสารสนเทศอาคารโดยเฉพาะอาคารสถาปัตยกรรมไทยได้ โดยที่จุดเด่นในการใช้ข้อมูลกลุ่มจุด 3 มิติ นั้นคือ มีความรวดเร็ว ปลอดภัย และความถูกต้องแม่นยำ เหมาะกับอาคารปกตธรรมดาทั่วไป และรวมไปถึงอาคารที่มีความซับซ้อนมาก ถ้าอาคารมีความซับซ้อนจะต้องทำการตั้งจุดสำรวจ ของ Laser scanner ให้ครอบคลุมพื้นที่
สำหรับจุดอ่อน ในการสำรวจอาคารด้วยข้อมูลกลุ่มจุด 3มิติ คือ เครื่องมือที่ใช้ในการสำรวจมีราคาสูงทั้งอุปกรณ์สำรวจ 3D Laser Scanner คอมพิวเตอร์ (high performance) และโปรแกรมคอมพิวเตอร์ FARO SCENE Software & Autodesk Revit
ข้อจำกัดในการทำสำรวจแบบเลเซอร์สแกนอาคารและข้อมูลกลุ่มจุด 3 มิติ คือ อาคารที่เป็นอาคารกระจก กรอบกระจกอาคารทำจากวัสดุมันวาวสะท้อนแสง เหล่านี้จะทำให้ข้อมูลสำรวจไม่สมบูรณ์ การสะท้อนกลับของแสงเลเซอร์ที่ไปตกกระทบอาคารกระจกไม่สะท้อนกลับ ทำให้ได้ข้อมูลไม่สมบูรณ์





ข้อมูลเพิ่มเติม
จำนวนทีมงาน :
2 คน (คนควบคุมกล้องสำรวจ1คนและคนควมคุมการวางจุดอ้างอิงร่วม Target Sphere Ball 1 คน)
อุปกรณ์ที่ใช้ :
1.กล้องสำรวจสามมิติ FARO Focus S150 3D Laser Scanner
2.ลูกบอลอ้างอิง Target Sphere Ball จำนวน 12ลูก
คุณสมบัติกล้องสำรวจ :
1.ระยะการสแกนเก็บข้อมูล 150เมตร
2.ระดับความคลาดเคลื่อน +/- 1มิลลิเมตร ที่ระยะสแกน 10เมตรและ 25เมตร
3.ระดับความละเอียดของข้อมูลปานกลาง : Resolution 1/4 และ Quality 3X (จำนวนครั้งในการยิงแสงเลเซอร์ไปตกกระทบวัตถุ 3รอบ)
4.เปิดโหมดสแกนด้วยแสงเลเซอร์และโหมดถ่ายภาพสีความละเอียดสูง 165MP
ระยะเวลาในการเก็บข้อมูลอาคาร (Site survey) จำนวน 3วัน
ระยะเวลาในการทำข้อมูลกลุ่มจุดของอาคาร(3D Point cloud Model) จำนวน 5วัน
ระยะเวลาในการสร้างแบบจำลองสารสนเทศอาคารโปรแกรม Autodesk Revit จำนวน 25วัน
รวมระยะเวลาการทำงาน 33วัน
ทีมงาน3DSurveyService.com ทีมงาน3DScan2BIM.com ทีมงานวาลิด วิชั่น จำกัด 3D Scan Service ตัวแทนจำหน่ายกล้องเลเซอร์สแกนฟาโรโฟกัส FARO Authorized Distributor FARO Focus Premium, FARO Focus CORE, FARO SCENEให้บริการงานสำรวจอาคารเก่า อาคารอนุรักษ์ อาคารโบราณสถานรับสำรวจอาคารโรงงานเพื่องานทำแบบ As-built, SCAN TO BIM Email: thanachai@validvision.co.th เบอร์ 093.198.0155